Lane detection evaluation
Pitch angle
evaluation

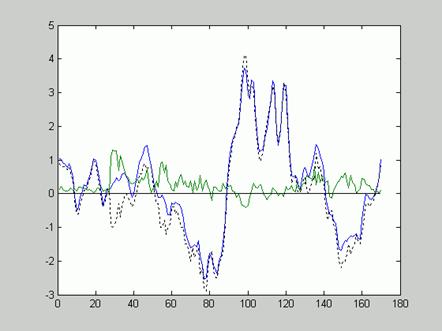
Pitch angle comparison
Highway behavior
evaluation

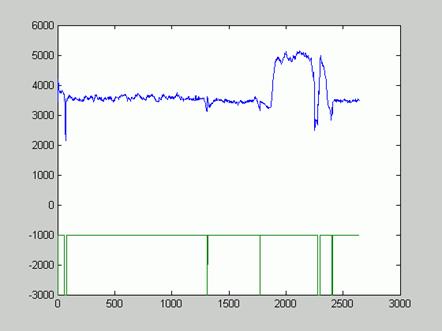
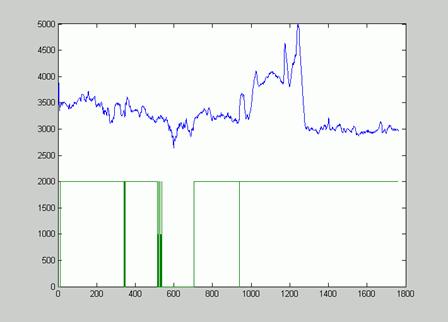
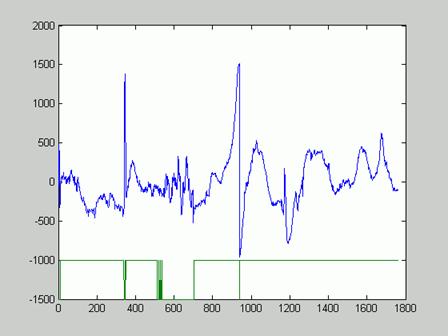
Width versus frame number. Width is in millimeters.
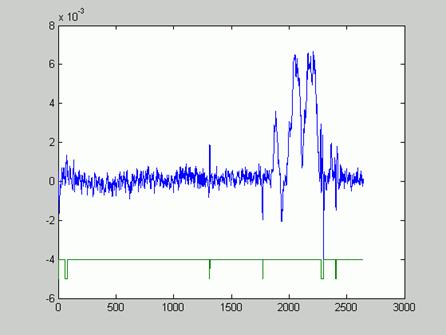
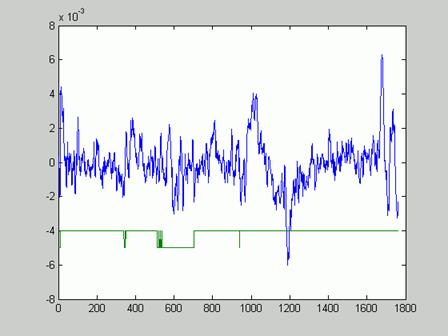
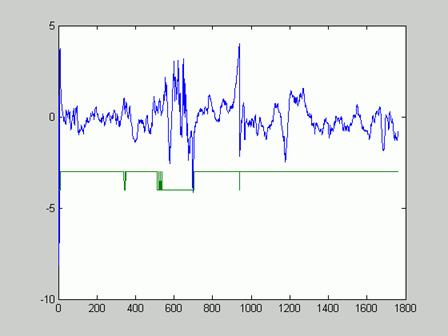
Horizontal curvature (in m-1) versus frame number
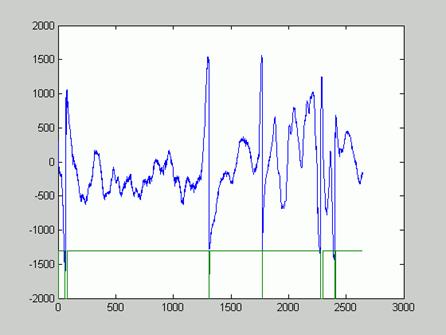
Lateral offset (distance of the vehicle from lane center, in mm) versus frame number
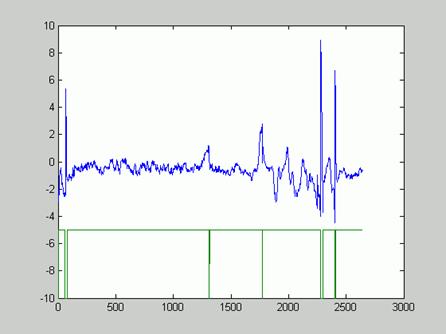
Yaw angle (in degrees) versus frame number
Urban behavior
evaluation
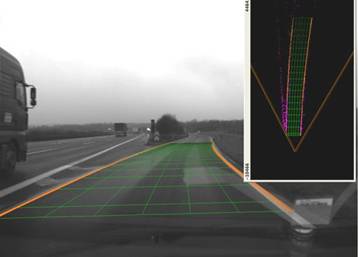
Comparison with a
Kalman filter solution
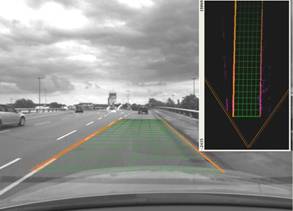
Left side of the picture – the PF solution

Behavior in a crowded
urban scenario

Experimental model – linear
variable width model
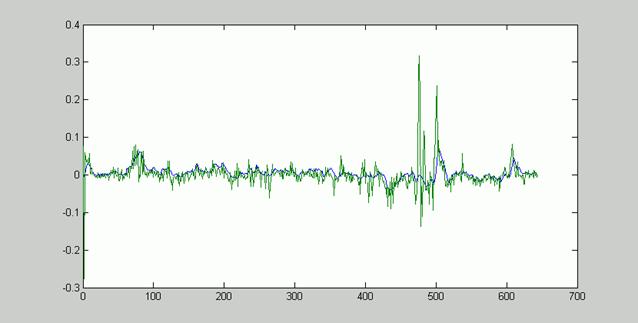
Comparison between width variation estimated by lane detection, and the differentiation of estimated width against traveled space